[Holybro] PX4 Vision Dev Kit V1.5

Description
The PX4 Vision Autonomy Development Kit is a robust and inexpensive kit for enabling computer vision development on autonomous vehicles.
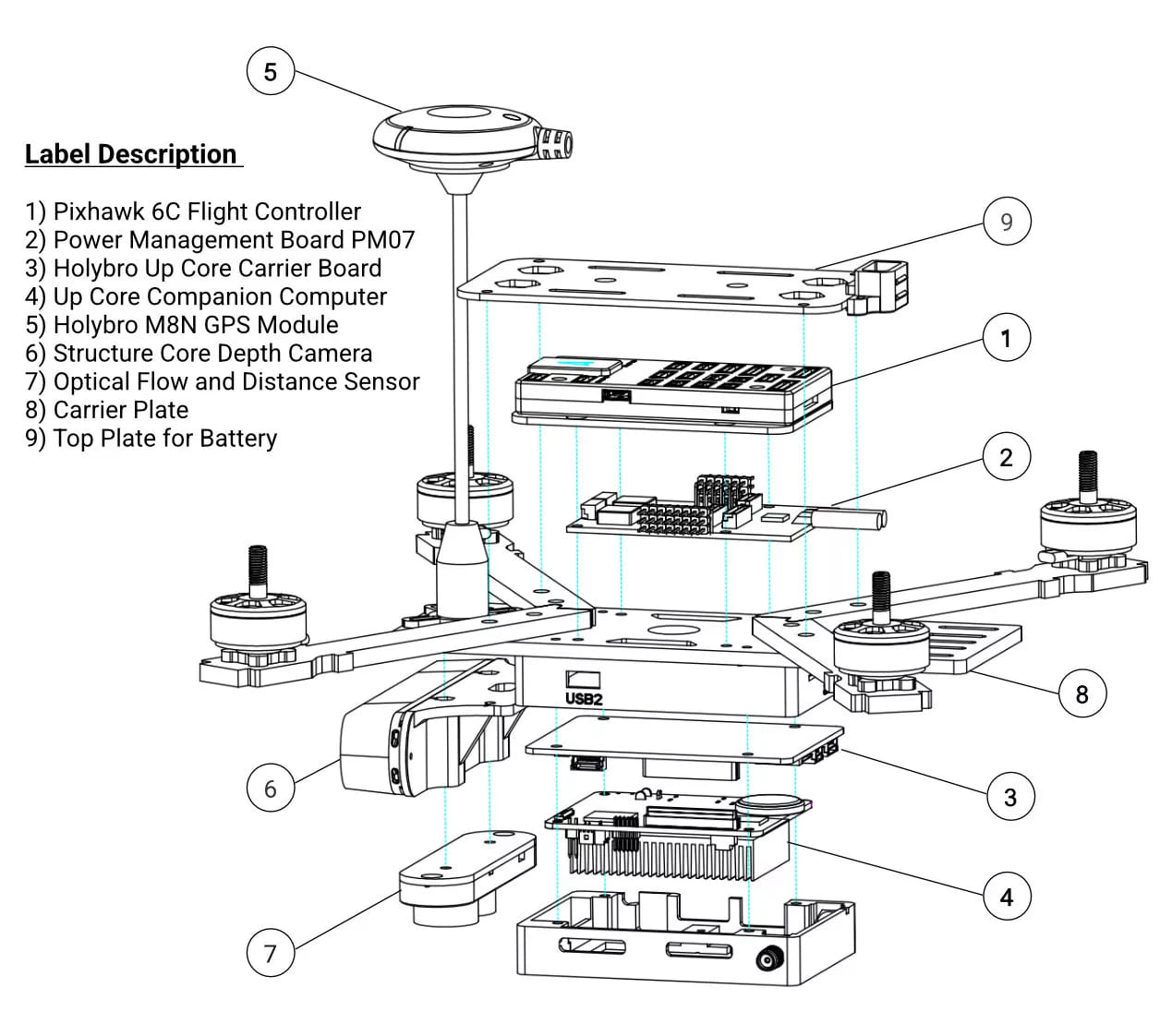
The kit contains a near-ready-to-fly carbon-fiber quadcopter equipped with a Pixhawk 6C flight controller, a UP Core companion computer (4GB memory & 64GB eMMC), and a Occipital Structure Core depth camera sensor. Ships preassembled.
Note: This vehicle comes with no software preinstalled.
There is a pre-imaged USB stick that has a reference implementation of the PX4/Avoidance local planner software provided by Auterion.
This is a basic software used only as a reference to show the basic function the PX4 vision can do.
Developers can use the kit to try out other features provided by the PX4 Avoidance project, modify the existing code, or experiment with completely new computer vision-based functionality.

The PX4 Vision Development Kit contains following components:
PX Vision v1 & v1.5 Difference
|
|
|
| Pixhawk 4 | Pixhawk 6C |
| AlienTek ATK-PMW3901 | Thone ThoneFlow-3901U |
| Connection | - AlienTek ATK-PMW3901 connects to "SPI" port
- TOF Infrared distance sensor (PSK-CM8JL65-CC5) connects to UART&I2C B
| - Thone ThoneFlow-3901U connects to "TELEM 3" Port
- TOF Infrared distance sensor (PSK-CM8JL65-CC5) connects to "GPS 2" Port
|
| Motor |
| TMOTOR P2207 V3.0 KV1750 |
| Propeller |
| Gemfan 6030-3 |